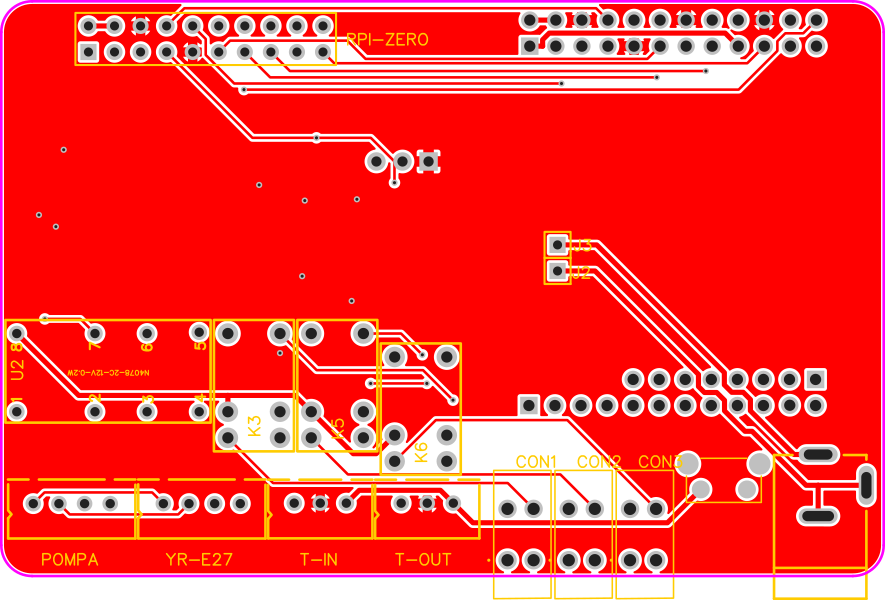
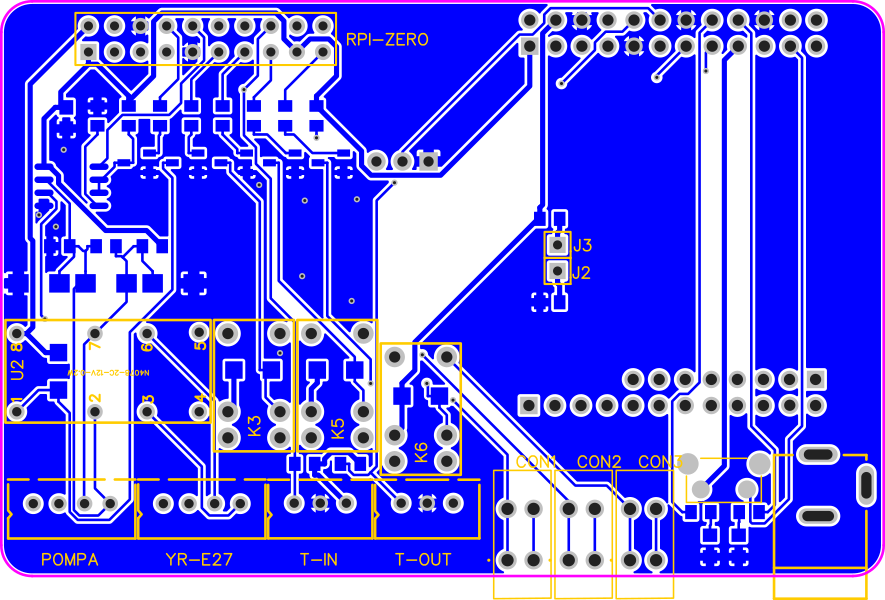
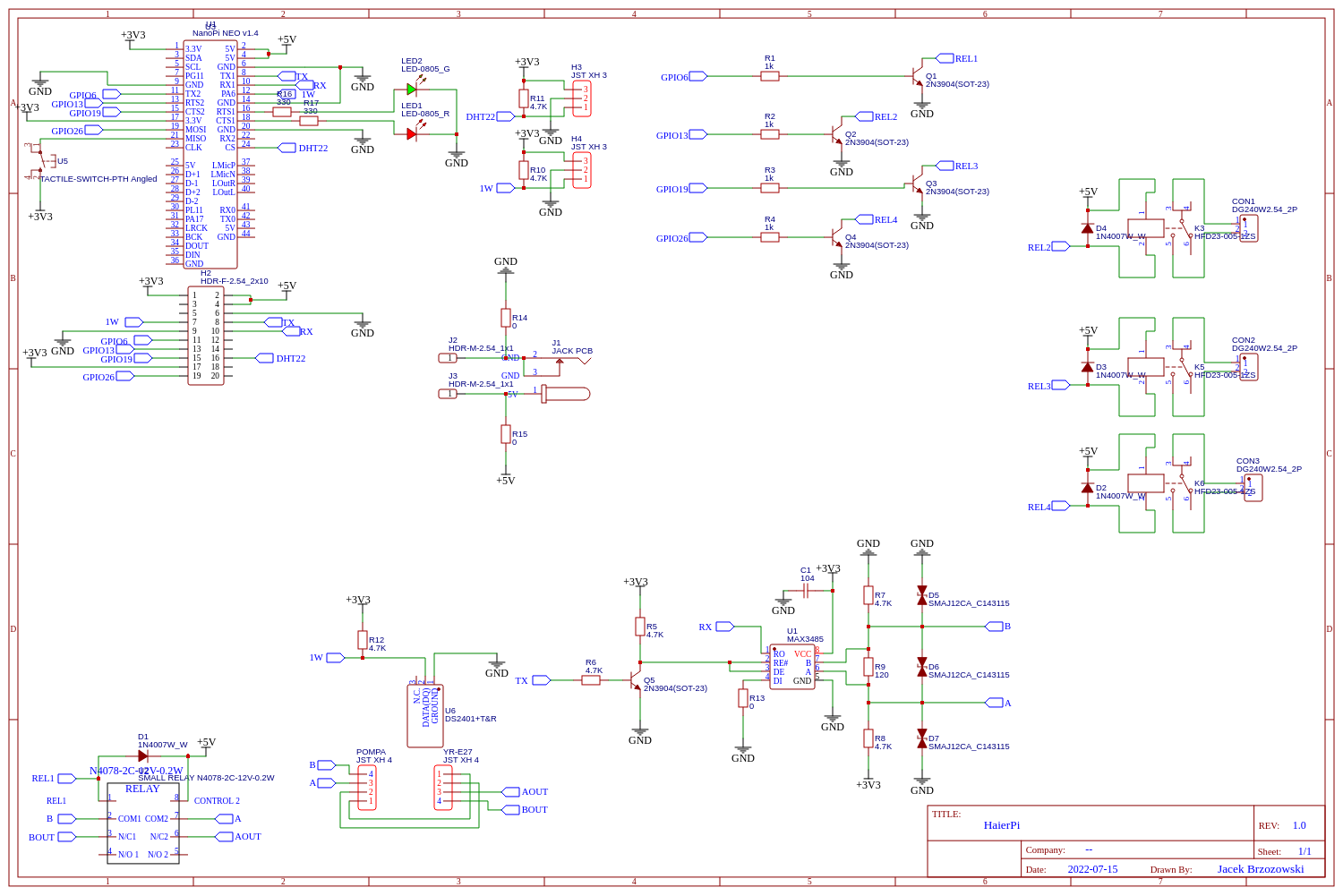
Płytka została zaprojektowana aby móc zainstalować w niej zarówno RaspberryPi zero jak i Nano Pi NEO. Płytka ma w sobie konwerter sygnału RS-485, zabezpieczony diodami TVS. Komunikacja pomiędzy Pilotem a Pompą odbywa się po protokole modbus.
Zasada działania protokołu modbus jest taka że w komunikacji występuje master i jeden, bądź wiele urządzeń slave. W naszym przypadku w roli mastera jest pilot, wiec chcąc wydać polecenie ze sterownika pompie, musimy pozbyć się na chwilę pilota, gdyż nie może być na raz 2 urządzeń master, do tego służy nam jeden z przekaźników na płytce. Oprogramowanie chcą zmienić coś w pompie, czeka na odpowiedni moment, rozłącza pilota, wydaje polecenia czekając na potwierdzenie i z powrotem podłącza pilota. Na pewno istnieje jakiś inny lepszy sposób aby to zrobić, ale ten wydawał mi się najprostrzy w implementacji.
Pozostałe 3 przekaźniki obsługują poszczególnie zworki ATW-a01 (zapotrzebowanie na grzanie, zapotrzebowanie na chłodzenie oraz ograniczenie mocy)
Schemat oraz wzrór płytki drukowanej dostępne są na GitHub projektu